A helper script spawn_model is provided for calling the model spawning services offered by gazebo ros node. Spawn a gazebo table model by the issuing the following command in another.
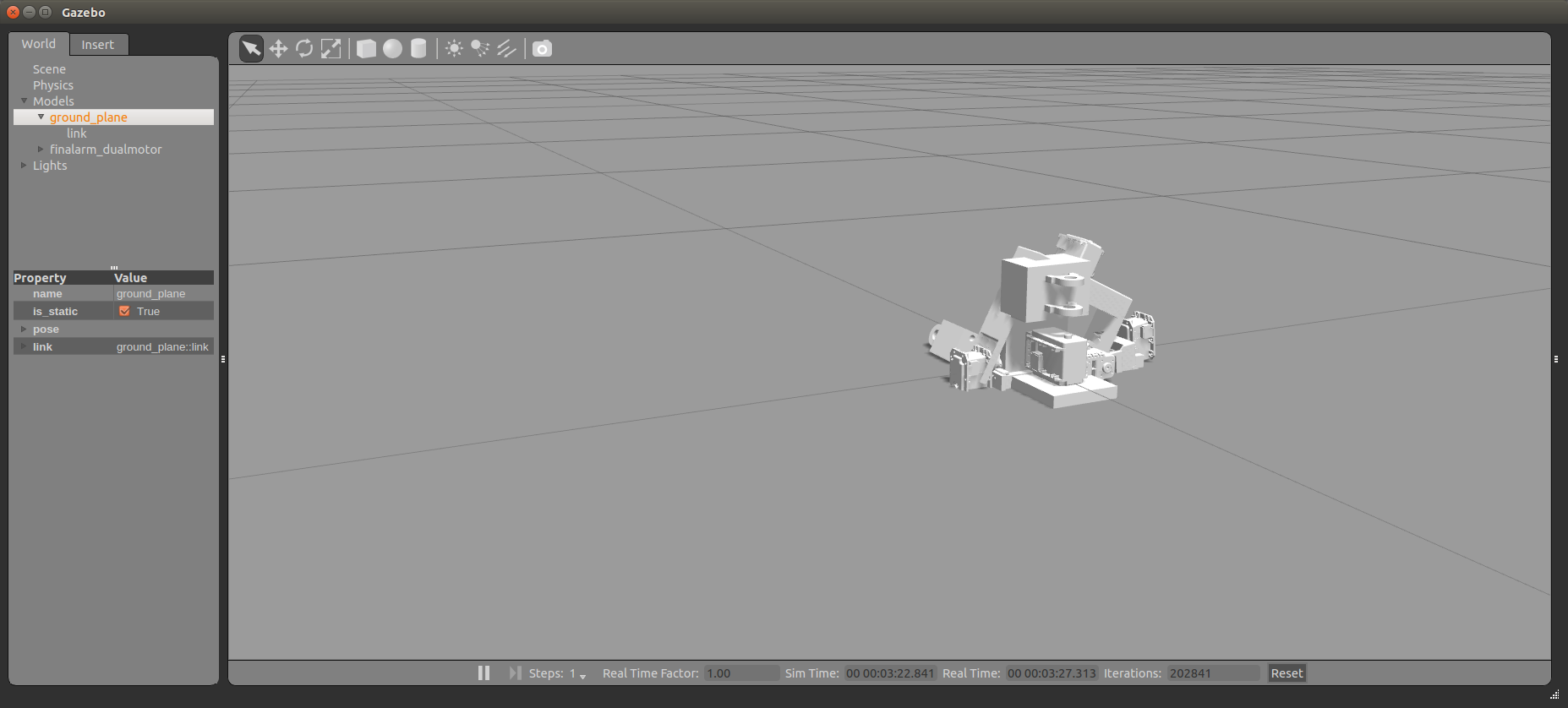
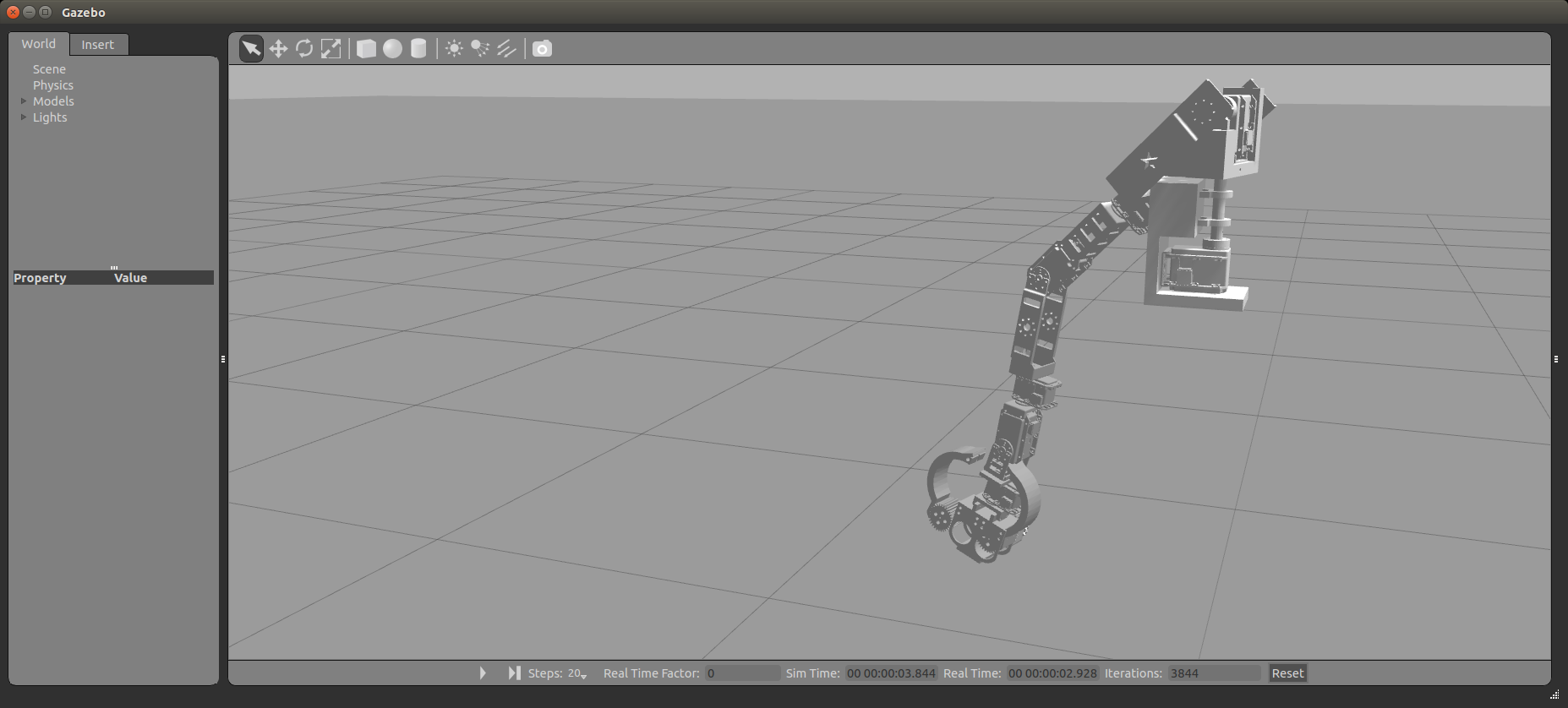
Robot Arm Is Broken Link By Link In Gazebo Ros Answers Open Source Q A Forum
In the end I accidentially ran rosrun gazebo_ros spawn_model -urdf -param robot_description -model ur5 -z 01 -J shoulder_pan_joint 00 -J shoulder_lift_joint 00 -J elbow_joint -04 -J wrist_1_joint 00 -J wrist_2_joint 05 -J wrist_3_joint 00 in a separate terminal although the model was already loaded in gazebo via the launch file - and this respawned the.

Gazebo ros spawn model. Heres an example on how to use the script. Look in the list of. Mycobot model seems to be spawned but it is interrupted by someone with signal_shutdown atexit.
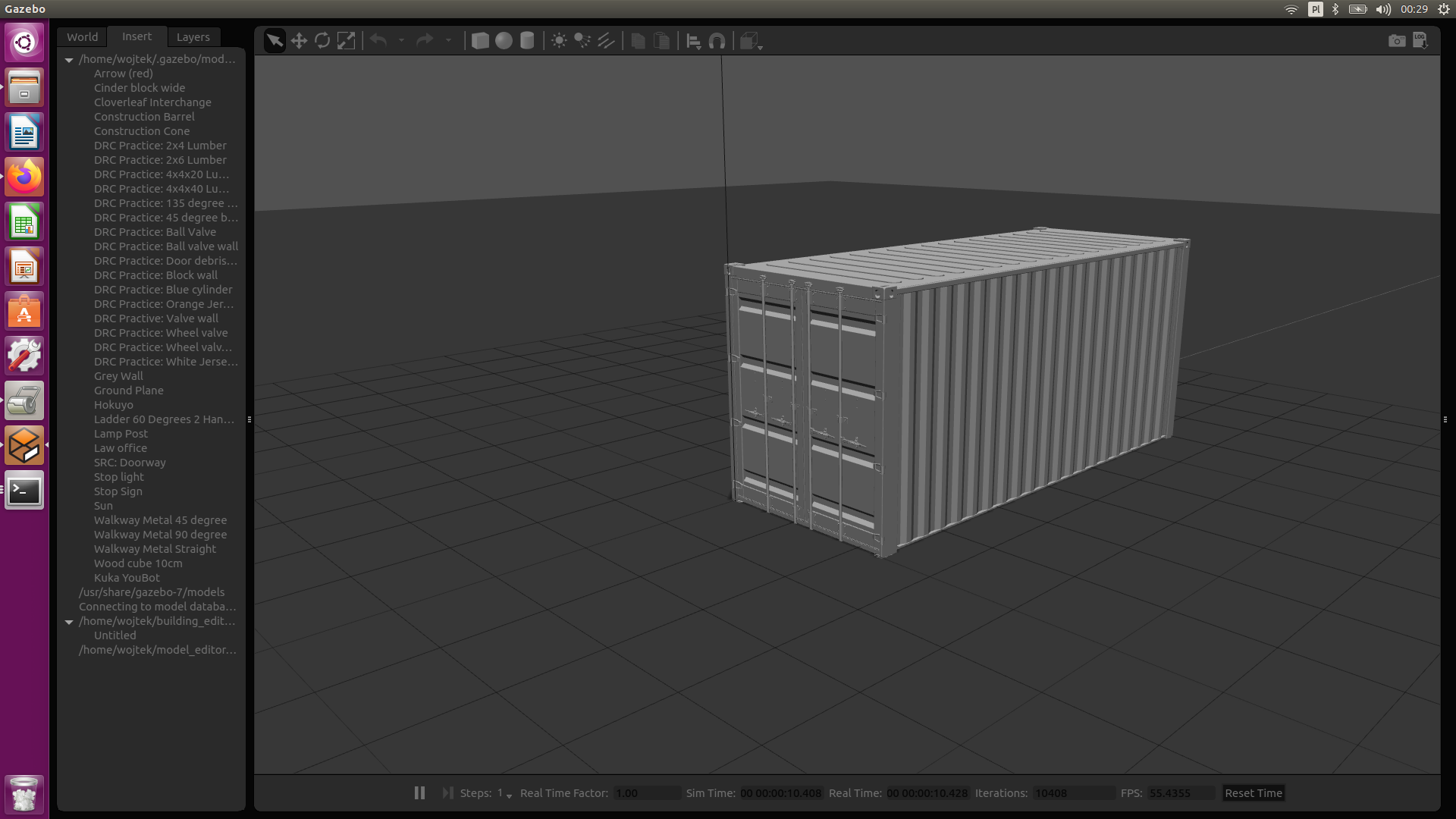
Click Insert in the top left. For i 110 spawnModelgazebopinxiyi07. My understanding of this suggests to me that I need two files a urdfxacro for the visual part and a gazeboxacro for the various sensors and plugin.
You will learn what to exactly setup so that gazebo can find t. This environment variable is required because of the separation of ROS dependencies. 6 Run the URDF spawner node.
Save the file and close it. I tested gazebolaunch on laptop host not Docker. My environment is following.
Why cant the Controller Spawner find the expected controller_manager ROS interface. How to use Gazebo mimic joints plugin. Ros2 run gazebo_ros spawn_entitypy -topic robot_description -entity my_cam_bot.
In this video were going to show you how to spawn an SDF model correctlyusing a ROS package. Initialize ROS by replacing ipaddress with the IP address of the virtual machine. How it is right now the robot will spawn in the coordinates 0 0 0 of the world the center.
The first two arguments are the robots name in gazebo and a namespace for the robot if you would like to add more than one. Gazebo ROS Notes 090 documentation. Catkin_create_pkg mobile_car_gazebo gazebo_msgs gazebo_plugins gazebo_ros gazebo_ros.
The following for loop spawns the models in Gazebo using the x and y vectors. Make sure to change the package name and launch file name to match yours. After adding the pins to the world it looks like this.
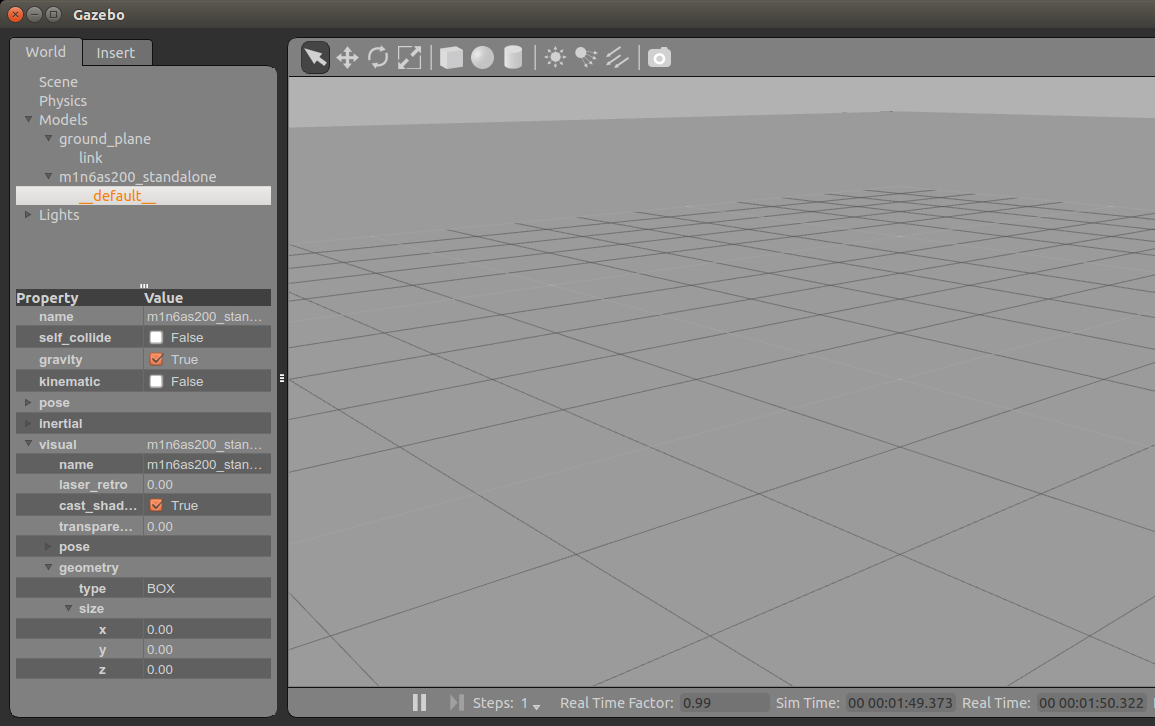
The number of vehicles to spawn. After searching for one day in all forums I tried the following so far no luck 1 runnning verbosetrue 2 running rosrun gzclient and then the launch file 3 making sure box size is not zero 4 transmission type properly mentioned 5 gazebo ros control plugin installed and mentioned in model file 6 gazebo ros control plugin installed please note that i was able to. Fix tests for cyclonedds The default RMW implementation changed.
I want to modify this file to charge my definitions and not only that corresponding to turtlebot3 so based on my understanding wrong I guess I did this. My question is this. Finally back in your original terminal use the following command to add a robot.
In order to simulate and control the robot with gazebo we need to add some tags to the urdf files. The x y z values represent the coordinates in the world where you want to spawn the robot. Gazebo model of ROSbot needed a little adjustments to support multiple ROSbots visualization in Rviz.
Then use below launch file. Iris default plane standard_vtol. To simulate multiple iris or plane vehicles in Gazebo use the following commands in the terminal from the root of the Firmware tree.
According update is already on repository issue git pull in rosbot_description package in your workspace to get updates. Models in gazebo can be spawned and deleted dynamically using the services gazebospawn_model and gazebodelete_model. Ubuntu 2004 ROS noetic Any suggestion is helpful for me.
The vehicle typemodel to spawn eg. It will automatically spawn at the. This switches to using lxml instead which has the same syntax and is already used by other ros2 packages.
The entity name will be the name of your model within gazebo so feel free to change my_cam_bot to whatever you want. To launch the model manually you will need to go to your bashrc file and add the path to the model so that Gazebo can find it. Rosrun gazebo_ros spawn_model -database coke_can -sdf -model coke_can3 -y 22 -x -03 To see all of the available arguments for spawn_model including namespaces trimesh properties joint positions and RPY orientation run.
Add a test. Rosrun gazebo_ros spawn_model -h Delete Model. Ros2 run robot_spawner_pkg spawn_turtlebot the_robot_name robot_namespace 00 00 01.
It was basically publishing topics and tf under namespaces. I will scroll down until I find Two Wheeled Robot. Deleting models that are already in Gazebo is easier as long as you know the model name you gave the.
Create a package that depend on the robot model mobile_car_description called mobile_car_gazebo. The second method of spawning robots into Gazebo allows you to include your robot within the world file which seems cleaner and more convenient but also requires you to add your robot to the Gazebo model database by setting an environment variable. General 5 demo 2 ros2.
Model Database Robot Spawn Method. If the TurtleBot exists in the scene remove it. Use lxml in spawn_entitypy The python xmletreeElementTree library does not handle xml namespaces well replacing namespaces of prefixed elements with ns0 ns1 etc.
Add the following line to the bottom of the file.
Gazebo In 5 Minutes 003 How To Spawn A Robot In Gazebo The Construct

Pin On Hackathon Wehack
Gazebo Spawning Model Incorrectly Ros Answers Open Source Q A Forum

Can Gazebo Publish Tf Transform Data Gazebo Q A Forum
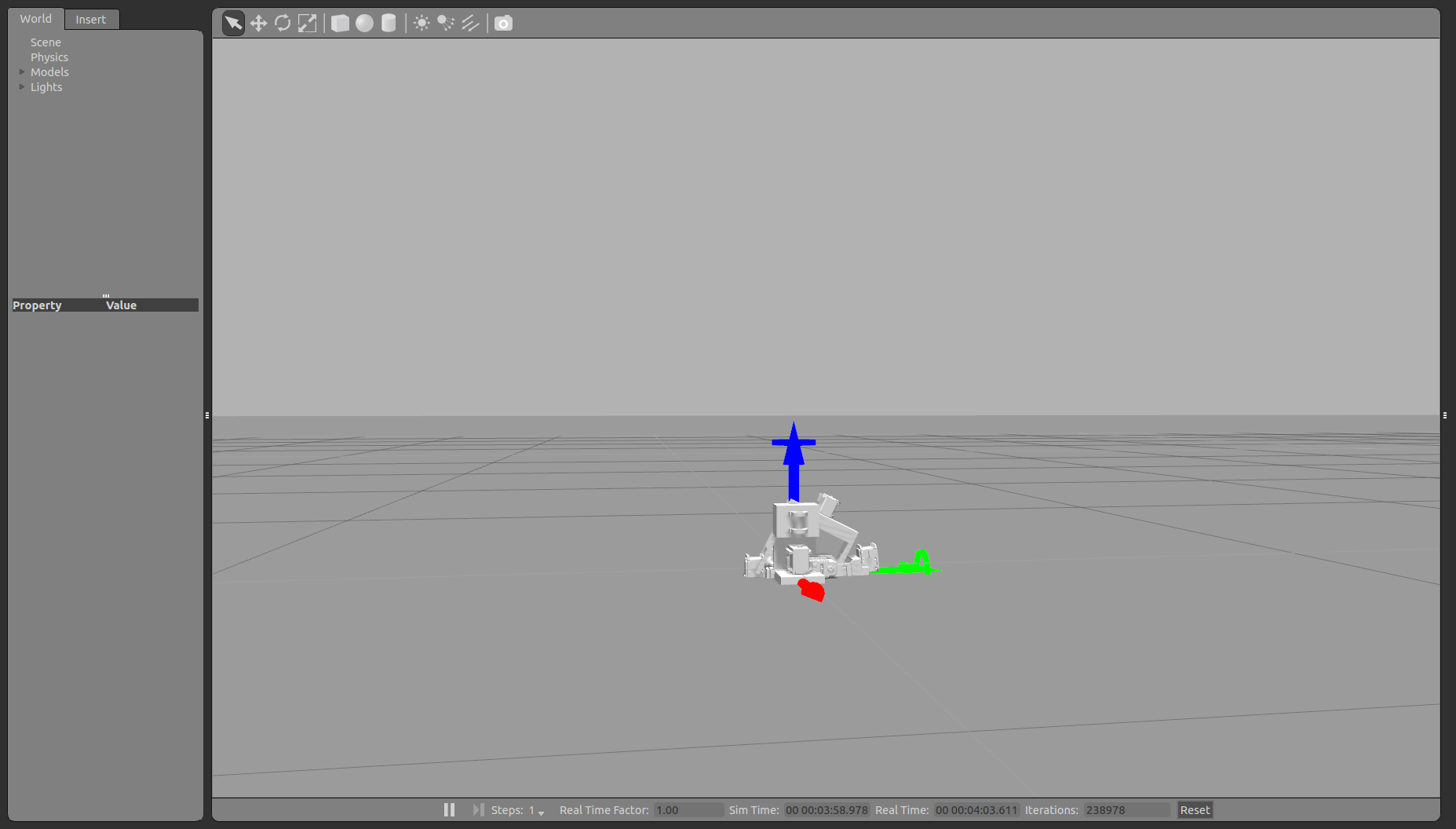
Robot Arm Is Broken Link By Link In Gazebo Ros Answers Open Source Q A Forum

Ros Q A Showing My Own Urdf Model In Gazebo Youtube
Empty Model Spawned In Gazebo Kinova Mico Jaco Xacro Ros Answers Open Source Q A Forum

Can Gazebo Publish Tf Transform Data Gazebo Q A Forum

How To Move A Gazebo Model From Terminal Varhowto

Ur3 Urdf Modification Does Not Load Well In Gazebo Closed Gazebo Q A Forum

Resize Simple Objects To Specific Sizes Gazebo Q A Forum
Robot Arm Is Broken Link By Link In Gazebo Ros Answers Open Source Q A Forum
Gazebo Freezes When Inserting A Custom Model Closed Ros Answers Open Source Q A Forum

Gazebo Does Not Load Simple Model Gazebo Q A Forum

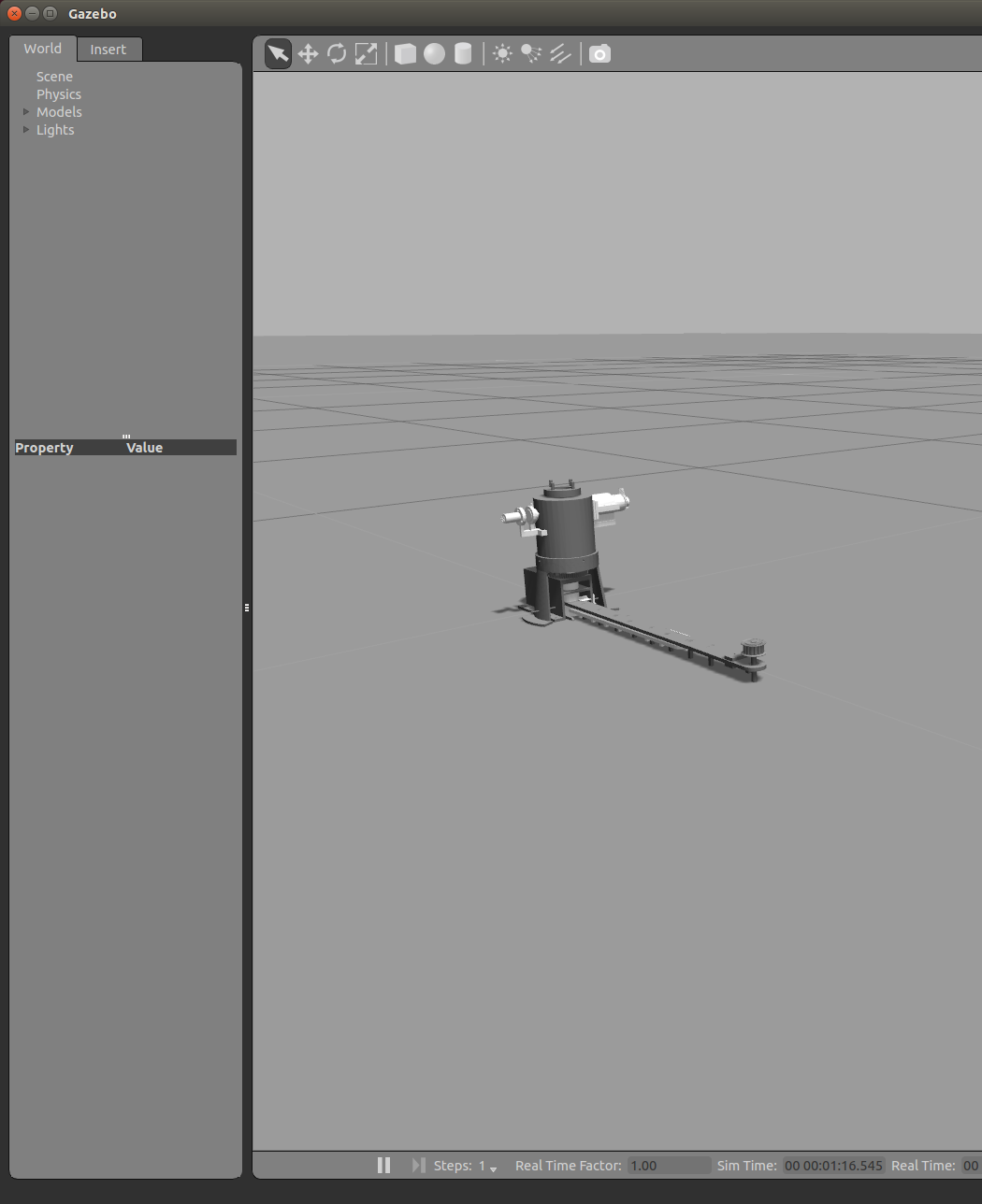
Gazebo Q A 003 How To Spawn An Sdf Custom Model In Gazebo With Ros Youtube
Panda Robot Oscillates In Gazebo After Spawning Ros Answers Open Source Q A Forum

Gazebo Q A 003 How To Spawn An Sdf Custom Model In Gazebo With Ros The Construct

Robot Is Not Visible In Gazebo Issue 1 Mkrizmancic Franka Gazebo Github
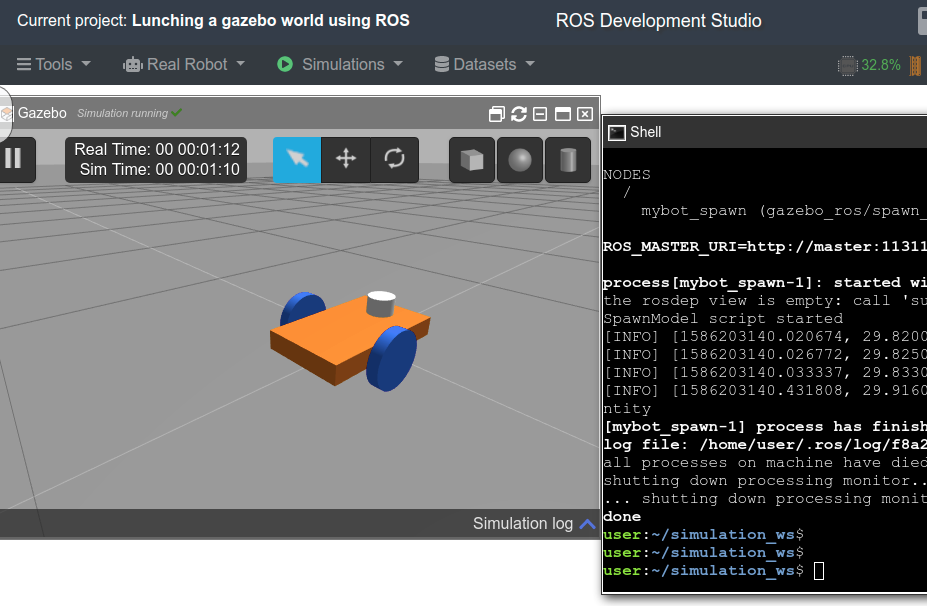
Gazebo In 5 Minutes 003 How To Spawn A Robot In Gazebo The Construct

