To import a model inside a Gazebo world one can simply open Gazebo navigate to the insert tab at the top left corner and use your mouse to drag models into the scene. However inserting the same plugin in a URDF file bears no effect.

Model Visualization In Gazebo Download Scientific Diagram
We will be using a standard version of ArduPilot but a custom plugin for Gazebo until the gazebo plugin gets merged into Gazebo-master.
Gazebo ros plugin. Create a world file. This package is a Gazebo ROS plugin for the Intel D435 realsense camera. Address most of the review feedback.
Import a Model into Gazebo World. Each plugin type is responsible for providing your. At his point I would recommend you to use the --verbose flag with Gazebo in order to see its log Eg.
Hanteus 13 3 4 7. Use existing Gazebo-ROS plugins. There are six types of plugins in Gazebo.
The plugin works when inserted in a world file. This plugin is useful in learning about moving robot bases with differential drive configuration. Gazebo_plugins last edited 2015-10-31 144746 by IsaacSaito Except where otherwise noted the ROS wiki is licensed under the Creative Commons Attribution 30.
This plugin was adapted from the octomap plugin from ETH Zürich. Initialize node node. This is the code of the plugin.
If a 3rd party plugin is useful and generic enough please consider pulling it into the. Or use the generic emptyworld launch file. All gazebo-ros plugins should check if the ROS node has already been initialized in their Load function as discussed in this issue.
After searching for one day in all forums I tried the following so far no luck. Get all the ROS code of the video in this link. Linters ros2 ENABLE_DISPLAY_TESTS and.
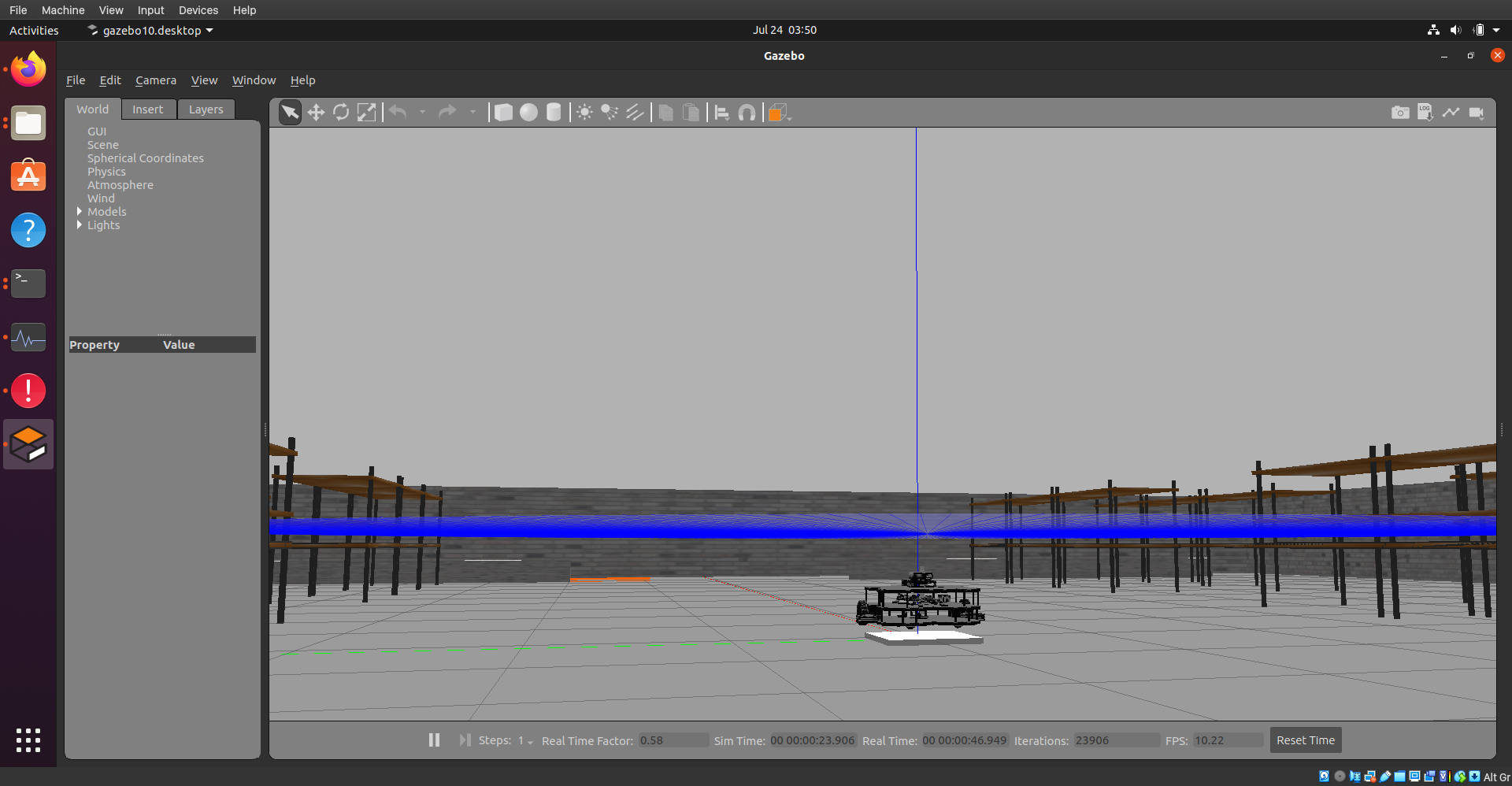
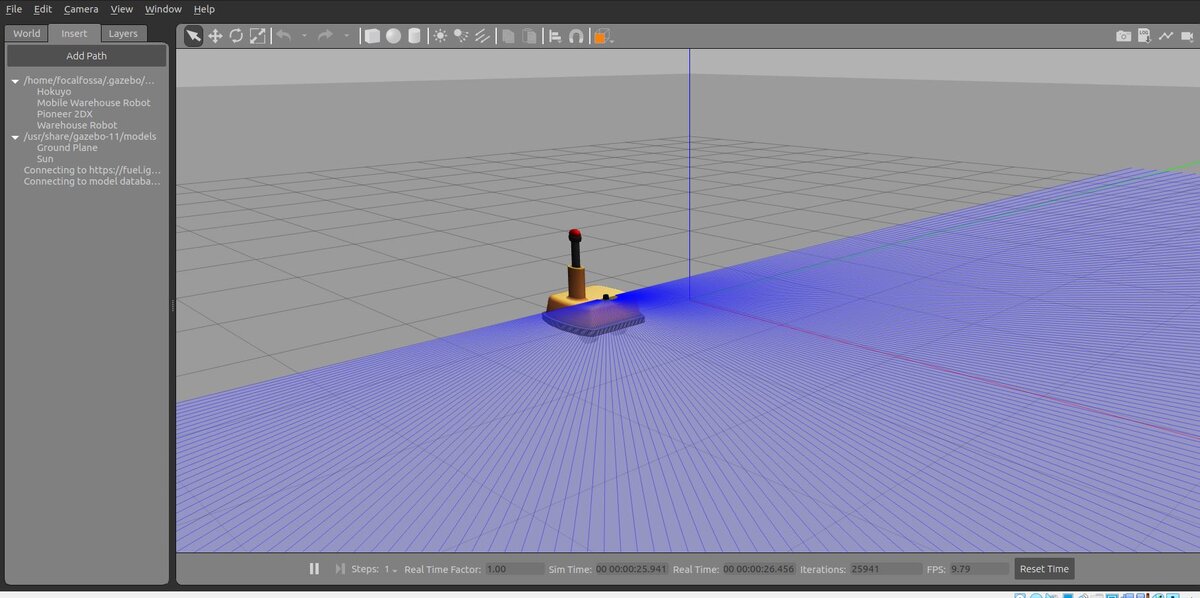
So our laser plug in is working seamlessly lets add more plugins URDF. I have made a simple Gazebo plugin that rotates an object at a speed it reads from a topic. In this tutorial were going to walk through the whole process of creating a basic ROS plugin for Gazebo SimulatorSetup a Catkin Workspace.
Gazebo offers a Differential Drive plugin that can be used in ROS. In both case we recommend to use Gazebo from the OSRF repository. Now you are ready to compile the plugin.
Intel RealSense Gazebo ROS plugin. Compilation should generate the library containing the plugin inside your building directory. Open a new terminal window and install the packages that will enable you to use ROS 2 to interface with Gazebo.
The plugin accepts velocity commands and publishes odometry information. Sudo apt install ros. API Docs Browse Code Wiki RosEco gazebo_grasp_plugin package from gazebo_tools repo gazebo_grasp_plugin gazebo_state_plugins gazebo_test_tools gazebo_version_helpers gazebo_world.
Just add the following to your 3_camera_lidar_gazebo_rvizurdf file. Since our main framework for robotics development will be ROS we need to learn how to use Gazebos plugins which we discussed earlier in this tutorial so that you can access the Gazebo functionality when youre working with ROS. Catkin_make Testing the Plugin.
A couple items remain. Remove the model_ member variable since it was just and alias for _parent. Roslaunch sensor_sim_gazebo gpslaunch Now you can list out the topic and find the GPS topics published from the Gazebo plugin.
Roscd cd. The ROS node pubblishes correctly the message on the topic but the plugin isnt able to acces them. We need to install a whole bunch of stuff including the differential drive plugin that will enable us to control the speed of our robot using ROS 2 commands.
In addition to the plugins explained above there are also a number of 3rd party Gazebo-ROS plugins. Write a Gazebo-ROS plugin. This is a continuation of work done by SyrianSpock for a Gazebo ROS plugin with RS200 camera.
Httpwwwrosjectiolbe09cefThis video aims to teach how the Gazebo plugins work with ROS and how to. The initialization of the ROS node is performed automatically when you run. Asked 2016-08-05 044750 -0500.
Very Similar to the Lidar plugin we have camera plugin provided by Gazebo wiki. GAZEBO plugin subscribe to ROS topic. How do I modify the plugin for it to work with my URDF file as well.
Gazebo simulator plugin to automatically generate a 2D occupancy map from the simulated world at a given certain height. The local patch provides modifications for performance debug outputs ROS-specific customizations capabilities etc. See gazebo_plugins wiki page about how you can contribute.
Sudo chmod x libmodel_pushso. However if you want to import a customized model that is not under the default gazebo model path this is what you. This ROS package checks out patches and compiles a pre-release version of the Gazebo Project from a WG branch which is based on svn trunk with some local patches and contains wrappers for using Gazebo with ROS.
Check out the plugin in your catkin_ws and build it with catkin_make. This plugin can be used with or without ROS integration. Use OnUpdate instead to get the UpdateInfo through the callback parameter.
Here is a list of topics from the GPS plugin. This video aims to teach how the Gazebo plugins work with ROS and how to use then to move a robot with mecanumomni wheels. Sensor Plugins for Gazebo-ROS Interface.
Gazebo tells us about the is going on with environment around the robot. Integrate ROS 2 and Gazebo Install gazebo_ros_pkgs. Robotics Ros Gazebo Plugin Projects 4 C Plus Plus Gazebo Plugin Domain Randomization Projects 3 Gazebo Plugin Domain Randomization Projects 3 Python Ros Kinetic Gazebo Plugin Projects 3 Ros2 Auv Projects 3 Python Simulation Ros Gazebo Plugin Projects 3 Python Simulation Gazebo Plugin Projects 3 Python Ros Gazebo Plugin Projects 3.
This package also includes the work developed by Intel Corporation with the ROS model fo the D435 camera. Gazebo --verbose my_worldworld and ensure you wrote the proper plugin name in the world file libmodel_pushso and the plugin has executable permissions Eg. Port the gazebo_ros_p3d plugin Port the gazebo_ros_p3d plugin.
Lets create a world file containing the plugin and launch it to see how it works. For your reference you may clone the source code from my git repository. 1 runnning verbosetrue 2 running rosrun gzclient and then the launch file 3 making sure box size is not zero 4 transmission type properly mentioned 5 gazebo ros control plugin installed and mentioned in model file 6 gazebo ros control plugin installed.
Demo test and a bit more cleaning up. Gazebo-ROS plugins are stored in a ROS package. Greetings I have some problems making a GAZEBO plugin and a ROS node communicate.

Perfetto Offerta Gazebo 3 X 3 Modern Gazebo Gazebo Gazebo Decorations
Gazebo Plugins Gazebo Ros Bumper No Contact Seen Issue 155 Ros Simulation Gazebo Ros Pkgs Github

How To Create A Ros Sensor Plugin For Gazebo The Construct
Prismatic Joint Not Working Properly With Ros2 Gazebo 11 Ros Answers Open Source Q A Forum

Multi Robot Fleet Simulation With Concurrent Gazebo Simulations Multi Robot Systems Ros Discourse
![]()
My Robotic Manipulator 04 Urdf Transmission Gazebo Controllers The Construct

Gazebo Small Warehouse Bookstore And Small House Worlds Available For Simulation General Ros Discourse
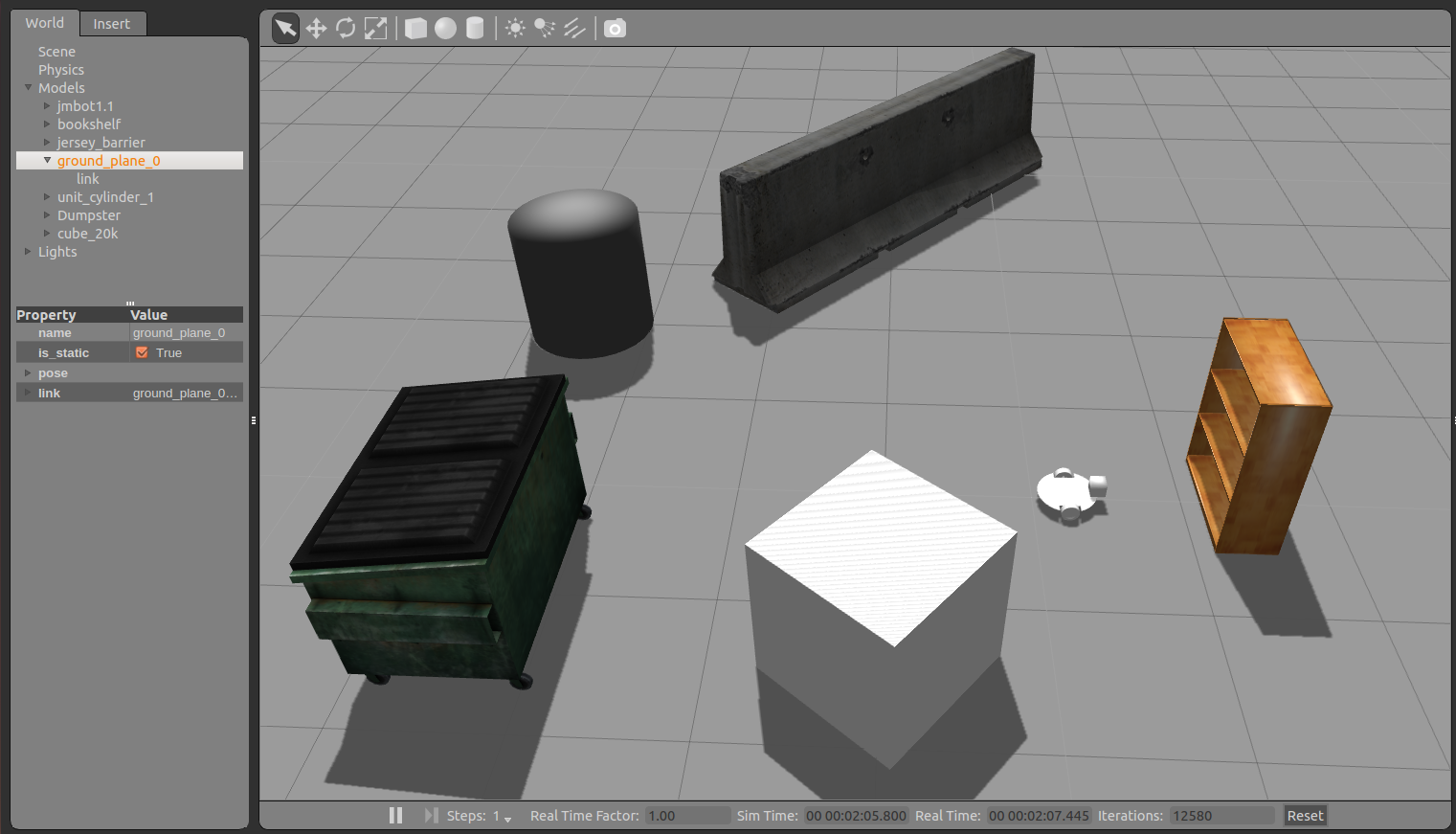
How To Simulate A Robot Using Gazebo And Ros 2 Automatic Addison

Ros Q A 190 Air Drag In Gazebo The Construct

Wedding Gazebo Gazebo Gazebo Wedding Patio Gazebo
Gazebo Q A 001 How To Create Gazebo Plugins In Ros Part 1 The Construct

Genuino Gazebo Ros Gazebo Decorations Gazebo Robot Operating System
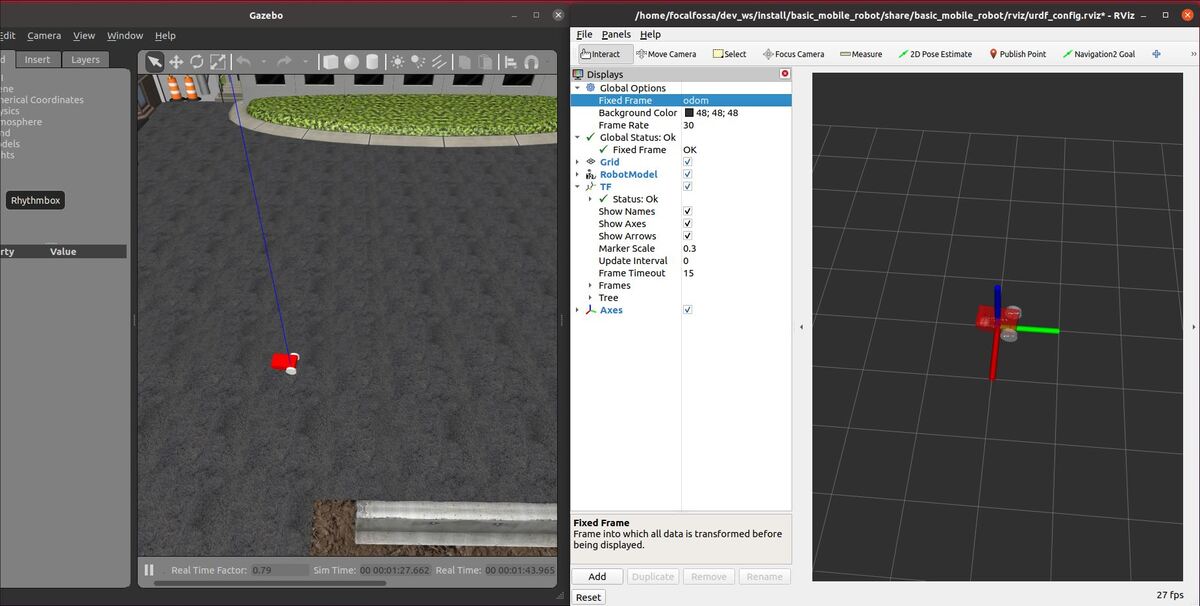
Set Up The Odometry For A Simulated Mobile Robot In Ros 2 Automatic Addison

Gazebo Q A 002 How To Create Gazebo Plugins In Ros Part 2 Youtube
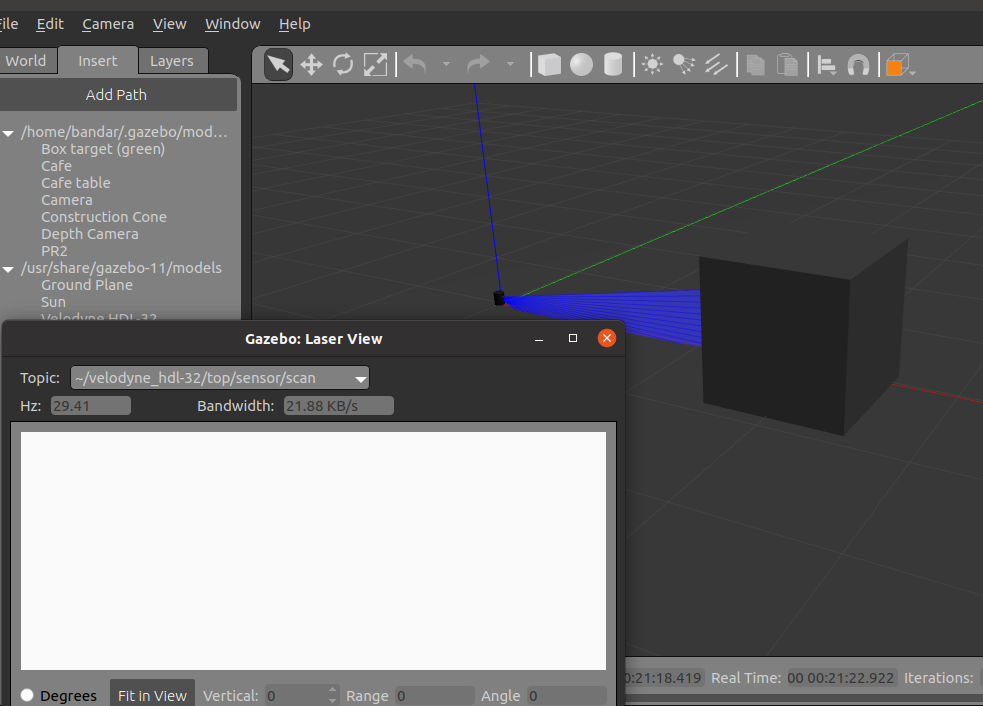
Gazebo Laser Plug In Fails To Publish Scan Results In Rviz Ros Answers Open Source Q A Forum

Impeccabile Gazebo A Ombrello Gazebo Ombrello Outdoor Living

Teleoperation Simulation On Gazebo Download Scientific Diagram
Gazebo Laser View Empty Screen Ros Answers Open Source Q A Forum

Ros Q A How To Create An Actuated Hexapod With Pid In Gazebo Video

