Vcs custom --args checkout gazebo11_foxy. If you check the documentation of Gazebo you will see that the following table corresponds to the default versions of Gazebo that automatically install.

Installing Ros Melodic On Wsl 2
This work presents an extension of the initial OpenAI gym for robotics using ROS and Gazebo.
Gazebo ros install. Change melodic for your ros version. We need to install a whole bunch of stuff including the differential drive plugin that will enable us to control the speed of our robot using ROS 2 commands. Add the osrfoundation repository to your sources list.
Sudo apt-get install gazebo7 gazebo7-plugin-base gazebo7-common libgazebo7. Sudo apt-get install ros-melodic-gazebo-ros. The ROS-wrapped versiong of Gazebo was removed in favor of the system install of Gazebo.
If playback doesnt begin shortly try restarting your device. Browse to the location of the Ubuntu image select ROS Indigo Gazebo v3 and press OK. This would allow you to use the new physics engines and features gazebo supports.
Sensor Plugins for Gazebo-ROS Interface. Wrappers tools and additional APIs for using ROS with the Gazebo simulator. A whitepaper about this work is available at Extending the OpenAI Gym for robotics.
This tutorial would cover the complete installation of ROS Indigo with gazebo 7. Formally simulator_gazebo stack gazebo_pkgs is a meta package. The exact command will be different according to the installation method.
The less ROS-specific patches are pushed back to the Gazebo repository incrementally as the package evolves. Test that stand-alone Gazebo works. Be sure to source your ROS setupbash script by following the instructions on the ROS installation page.
Sudo apt install ros-foxy-gazebo-ros-pkgs Install from source on Ubuntu If you are an active developer setting up to contribute to the code base it is advisable to have the source installation as it provides more access and control over the workflow. The script installs everything you need. The easiest way to setup PX4 simulation with ROS on Ubuntu Linux is to use the standard installation script that can be found at Development Environment on Linux Gazebo with ROS.
Next you need to install ROS which ARIAC uses to provide the competition interface. Import a Model into Gazebo World. First update the apt-get database since you added the OSRF packages repository to the sources list.
Installing ROS Indigo with Gazebo7. The local patch provides modifications for performance debug outputs ROS-specific customizations capabilities etc. Download the archive containing the virtual machine.
You should install Gazebo 9 or later. Open a new terminal window and install the packages that will enable you to use ROS 2 to interface with Gazebo. If installing from source be sure to build the gazebo_XY XY being your desired version branch.
Gazebo is also released as an Ubuntu official package. It offers a wide of sensors and interfaces as well a. Build Gazebo ROS Packages.
This may require reconfiguration of your CMake file. Install ros-ROS_DISTRO-gazebo11-ros-pkgs andor ros-ROS_DISTRO-gazebo11-ros-control from the osrfoundation repository which will install the gazebo11 package. A few years later in the Spring of 2011 Willow Garage started providing financial support for the development of Gazebo.
This ROS package checks out patches and compiles a pre-release version of the Gazebo Project from a WG branch which is based on svn trunk with some local patches and contains wrappers for using Gazebo with ROS. How to install Gazebo ROS Gazebo 9 in an existing ROS environment. Assuming you already have some Foxy debian packages installed install gazebo_ros_pkgs as follows.
Decompress the archive to a location on your hard drive. PX4 ROS Melodic the Gazebo 9 simulator and MAVROS. HOWEVER for step 5 you will need to use the following instead.
You must install the gazebo-ros package. This tutorial assumes you have successfully installed ROS which should also install Gazebo for you. This will give the following output.
If you do you probably installed the version of Gazebo that came by default with that ROS distribution. Full desktop version of ROS Indigo comes pre-installed with gazebo 22 which released in 2013. In VMware Player press Open a Virtual Machine.
Check which version is available for every distribution. Import a Model into Gazebo World. I presume that you already have a ROS distribution in your system.
The following is an example CMakeListstxt. Robotics gazebo ros ros2Gazebo is an open source 3D Dynamic simulator used for robotics development. In 2012 Open Source Robotics Foundation OSRF spun out of Willow Garage and became the steward of the Gazebo.
Its just the matter of running. If you are a ROS user please read the tutorial about ROSGazebo installation. This package will update to newer revisions of Gazebo.
How do I install a gazebo Ros package. The best way to use Gazebo launch files is to simply inheritinclude the master empty_world launch file located in the gazebo_ros package. To import a model inside a Gazebo world one can simply open Gazebo navigate to the insert.
For the version ROS Melodic is the current release and Gazebo 9 is bundled with ROS. To build the Gazebo ROS packages you can following the steps as indicated in the section Install from source on Ubuntu from the Installing gazebo_ros_pkgs ROS 2 guide. You can install Gazebo either from source or from pre-build Ubuntu debians.
You can install Gazebo either from source or from pre-build packages. In 2009 John Hsu a Senior Research Engineer at Willow integrated ROS and the PR2 into Gazebo which has since become one the primary tools used in the ROS community. Use catkin workspaces to compile the rest of the software used from source.
Please use the following BibTex entry to cite our work. Install ROS Noetic Gazebo 10 on Ubuntu 2004. ROS is only supported on Linux not macOS or Windows.
Now Catkinized and works with the standalone Gazebo debian. Download and install the VMware Player software. In this tutorial we show you how to start Gazebo using the roslaunch commandTo download ROS go to this link.
An OpenAI gym extension for using Gazebo known as gym-gazebo. Sudo apt-get install ros-lunar-gazebo-ros-pkgs ros-lunar-gazebo-ros-control. Whats more we can launch Gazebo in a ROS launch file and pass in relevant parameters which makes our life much easier.
Dont forget to source setupbash script as instructed on the ROS installation page.
All About Gazebo Ros Gazebo 9 The Construct
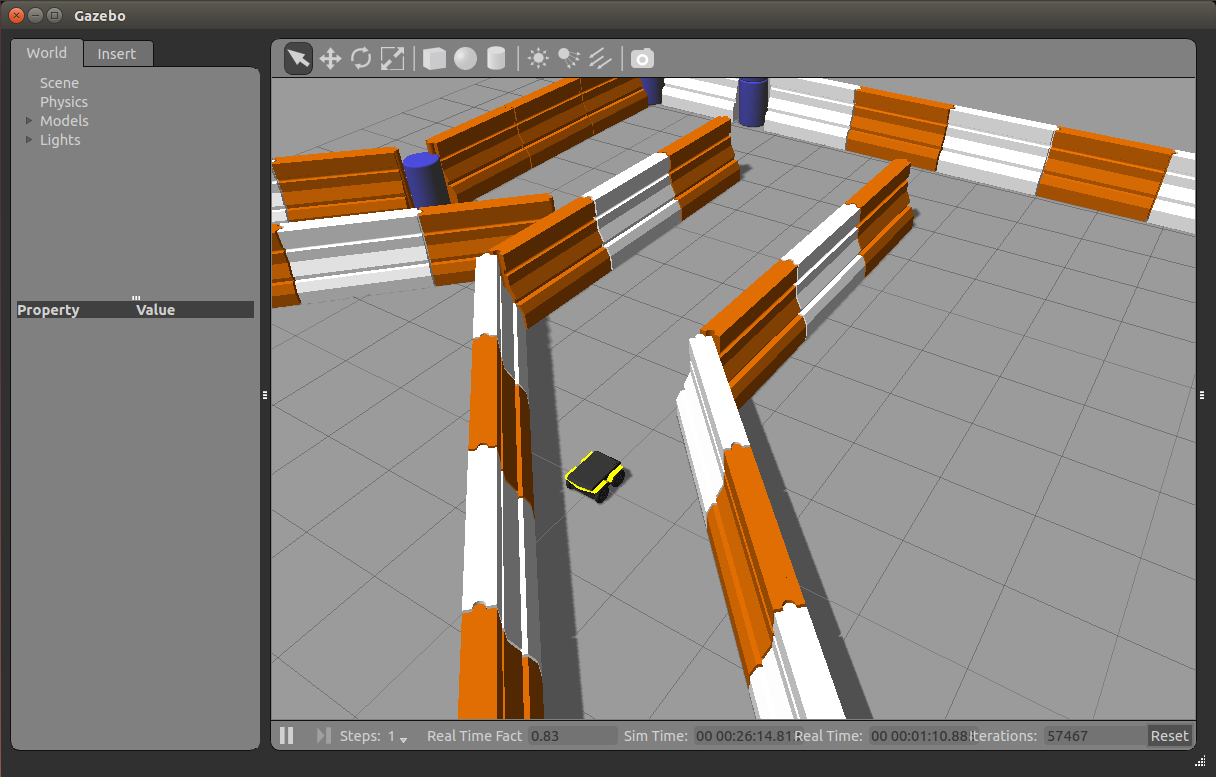
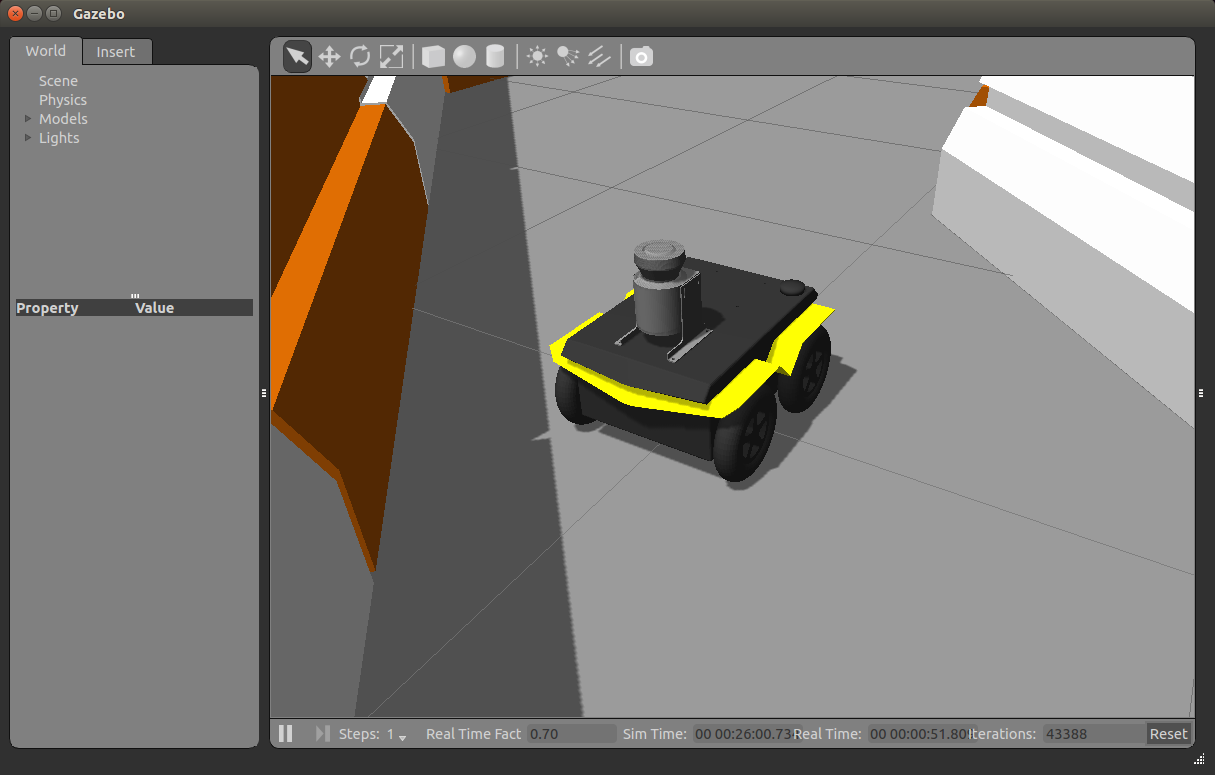
Simulating Jackal Jackal Tutorials 0 5 4 Documentation
Gazebo Plugins Gazebo Ros Bumper No Contact Seen Issue 155 Ros Simulation Gazebo Ros Pkgs Github

Floor And Texture Changed Black Gazebo Q A Forum

Ignition Gazebo Simulator For Noetic And Foxy General Ros Discourse

Ros Q A How To Have Any Gazebo Sim Running In 5 Minutes
All About Gazebo Ros Gazebo 9 The Construct
Simulating Jackal Jackal Tutorials 0 5 4 Documentation
All About Gazebo Ros Gazebo 9 The Construct
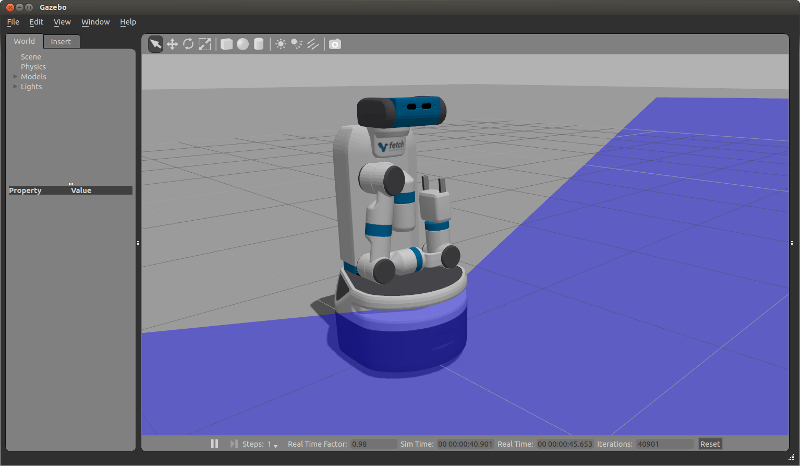
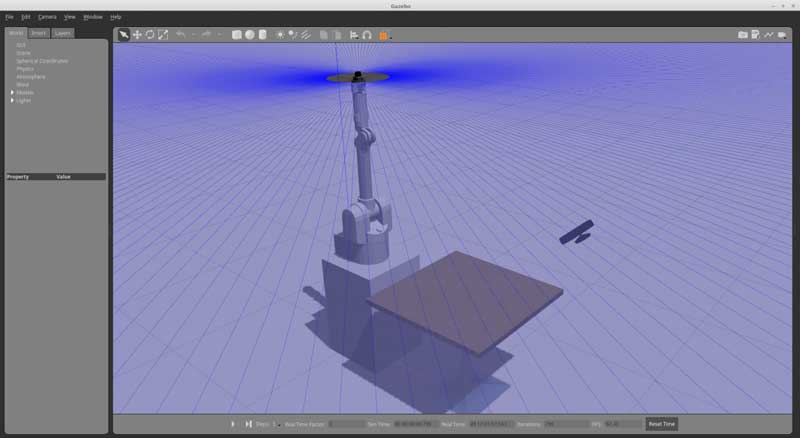
Tutorial Gazebo Simulation Fetch Freight Research Edition Melodic Documentation

Setting Up Ros Kinetic And Gazebo 8 Or 9 By Abhik Singla Medium

Gazebo In 5 Mins 001 How To Launch Your First Gazebo World Using Ros Youtube
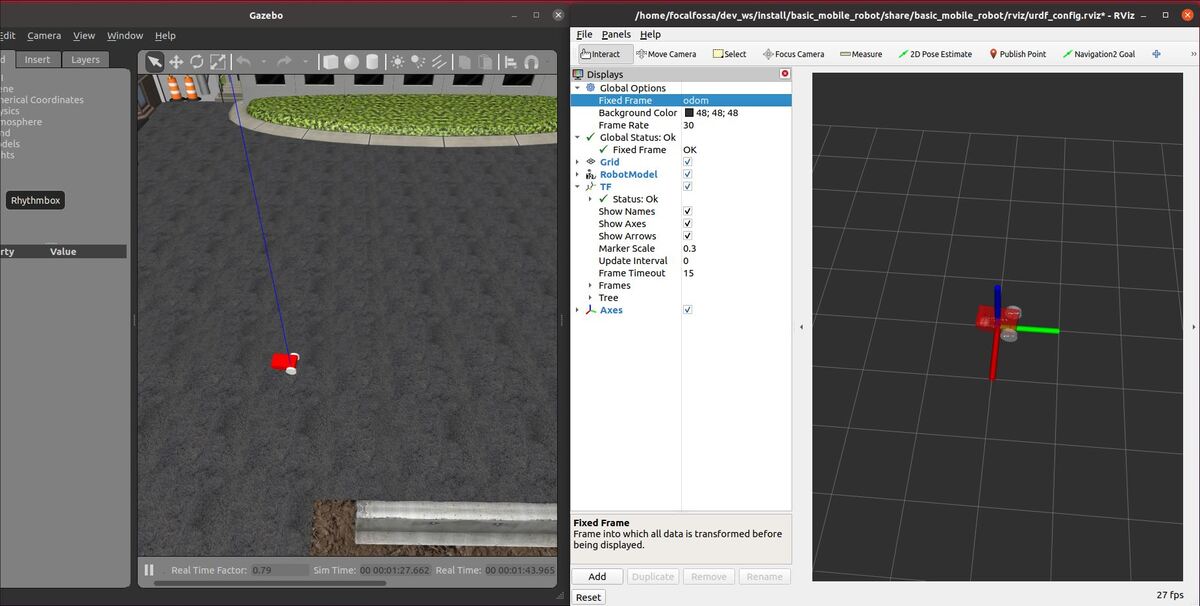
Set Up The Odometry For A Simulated Mobile Robot In Ros 2 Automatic Addison

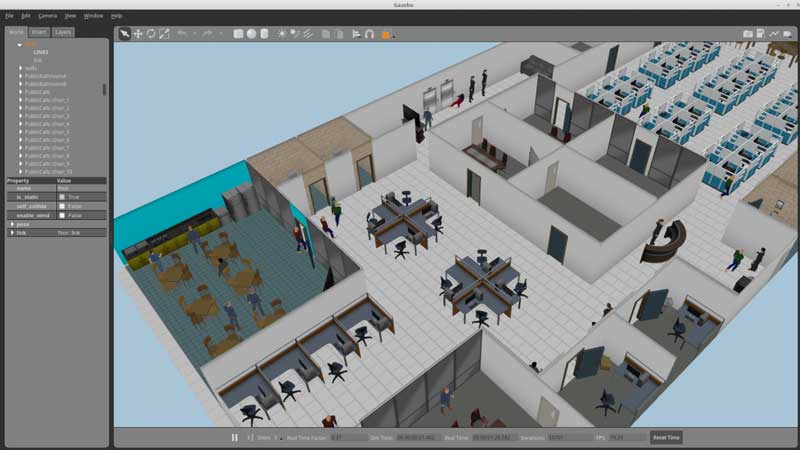
Robotic Simulation Scenarios With Gazebo And Ros
All About Gazebo 9 With Ros Let S See How To Install Gazebo 9 By Ricardo Tellez Medium

Ubuntu 18 04 With Ros Melodic And Gazebo 9 Hovering Example Not Working Issue 25 Gsilano Crazys Github
Drive A Husky Ros Tutorials 0 5 2 Documentation

Install Gazebo Using Ubuntu Packages Youtube
How To Simulate A Robot Using Gazebo And Ros 2 Automatic Addison

